การประกอบและติดตั้ง
ขั้นตอนการประกอบหุ่นยนต์ myCobot 280 JN เข้ากับชุด AIKit 3D Vision อย่างละเอียด พร้อมข้อควรระวังในแต่ละขั้นตอน
3.1 ภาพรวมของขั้นตอนการประกอบ
การประกอบระบบทั้งหมดแบ่งออกเป็น 6 ขั้นตอนหลัก:
- ติดตั้งฐาน AIKit 3D Vision บนโต๊ะทำงาน
- ติดตั้งหุ่นยนต์ myCobot 280 JN บนฐาน
- ติดตั้งกล้อง 3D Vision เหนือพื้นที่ทำงาน
- ติดตั้ง End-Effector (ปั๊มสุญญากาศ หรือ Gripper)
- ต่อสายไฟและสายสัญญาณ ทั้งหมด
- ตรวจสอบความเรียบร้อย ก่อนเปิดเครื่อง
ควรทำการประกอบบนโต๊ะที่มั่นคง แห้ง และมีแสงสว่างเพียงพอ ใช้เวลาประมาณ 30-45 นาที สำหรับผู้ที่ประกอบเป็นครั้งแรก
3.2 การติดตั้งฐานและหุ่นยนต์
3.2.1 การติดตั้งฐาน AIKit 3D Vision
ฐาน AIKit 3D Vision ออกแบบมาเพื่อรองรับการทำงานของหุ่นยนต์และกล้อง 3D Vision โดยมีพื้นที่ทำงาน (Working Area) ที่กำหนดไว้อย่างชัดเจน
- วางฐาน AIKit บนโต๊ะให้อยู่ในตำแหน่งที่เหมาะสม โดยให้มีพื้นที่ว่างรอบฐานอย่างน้อย 30 เซนติเมตร ในทุกทิศทาง
- ตรวจสอบให้แน่ใจว่าฐานอยู่ในแนวระนาบ ไม่เอียงหรือโยก หากพื้นโต๊ะไม่เรียบ ให้ใช้แผ่นรองปรับระดับ
- ขันสกรูยึดฐานเข้ากับโต๊ะ (ถ้ามีรูสำหรับยึด) เพื่อความมั่นคง
3.2.2 การติดตั้งหุ่นยนต์ myCobot 280 JN
- นำหุ่นยนต์ myCobot 280 JN วางบนฐาน AIKit ในตำแหน่งที่ระบุไว้ (โดยทั่วไปอยู่ด้านหนึ่งของฐาน)
- จัดให้รูยึดของฐานหุ่นยนต์ตรงกับรูยึดบนฐาน AIKit
- ใช้สกรูที่ให้มาในชุด (โดยทั่วไปเป็นสกรู M4) ขันยึดให้แน่น 4 จุด
- ตรวจสอบว่าหุ่นยนต์ไม่โยกหรือคลอน เมื่อจับเขย่าเบา ๆ
ห้ามยกหุ่นยนต์โดยจับที่ข้อต่อ (Joint) เด็ดขาด เพราะอาจทำให้มอเตอร์ภายในเสียหายได้ ให้จับที่ฐานหรือลำตัวของหุ่นยนต์เท่านั้น
3.3 การติดตั้งกล้อง 3D Vision
กล้อง 3D Vision ทำหน้าที่ตรวจจับวัตถุและประมาณตำแหน่งในระนาบ 3 มิติ การติดตั้งที่ถูกต้องเป็นสิ่งสำคัญต่อความแม่นยำของระบบ
3.3.1 ตำแหน่งและความสูง
- ติดตั้งกล้องบนแท่นยึด เหนือพื้นที่ทำงาน
- ความสูงที่แนะนำ: 35-45 เซนติเมตร จากพื้นผิวการทำงาน
- กล้องต้องมองเห็นพื้นที่ทำงานทั้งหมดอย่างชัดเจน ไม่มีสิ่งบดบัง
- ทิศทางของกล้องต้องตั้งฉากกับพื้น (Top-down view) หรือเอียงเล็กน้อยตามที่กำหนด
3.3.2 ขั้นตอนการติดตั้ง
ปิดเครื่องและถอด Adapter ออกก่อนต่อสายของกล้องเข้ากับ Jetson Nano เพื่อป้องกันความเสียหายจากไฟฟ้าลัดวงจร
- ประกอบแท่นยึดกล้อง (Camera Mount) เข้ากับฐาน AIKit ตามคู่มือฮาร์ดแวร์
- ติดตั้งกล้อง 3D Vision เข้ากับแท่นยึด โดยขันสกรูยึดให้แน่น
- ปรับมุมและทิศทางของกล้องให้มองเห็นพื้นที่ทำงานทั้งหมด
- ตรวจสอบเลนส์กล้องว่าสะอาด ไม่มีรอยนิ้วมือหรือฝุ่น
ตำแหน่งกล้องที่ถูกต้องส่งผลโดยตรงต่อความแม่นยำในการตรวจจับวัตถุ หากกล้องเอียงหรือสูงเกินไป อาจทำให้ระบบประมาณตำแหน่งผิดพลาดได้
3.4 การติดตั้ง End-Effector
End-Effector คือเครื่องมือที่ติดอยู่ปลายแขนหุ่นยนต์เพื่อใช้หยิบจับวัตถุ ชุด AIKit รองรับ End-Effector หลัก 2 ประเภท
3.4.1 การติดตั้งปั๊มสุญญากาศ (Vacuum Pump V2.0)
ปั๊มสุญญากาศใช้สำหรับหยิบจับวัตถุที่มีพื้นผิวเรียบ เช่น ลูกบาศก์พลาสติก แผ่นโลหะบาง หรือกระดาษแข็ง โดยปลายแขนหุ่นยนต์จะติดตั้งหัวดูด (Suction Cup) และต่อสายเข้ากับชุดปั๊มที่ควบคุมผ่าน GPIO ของ Jetson Nano
ก่อนเริ่มต่อสายไฟและสายสัญญาณทุกครั้ง ให้ปิดเครื่อง Jetson Nano และถอดอะแดปเตอร์ออกจากเต้ารับเสียก่อน เพื่อป้องกันไฟฟ้าลัดวงจรและความเสียหายต่อบอร์ด
- นำหัวดูดสุญญากาศ (Suction Cup) ประกอบเข้ากับ Flange ที่ปลายแขนหุ่นยนต์ (Joint 6)
-
ใช้ LEGO Plugin ยึดหัวดูดให้แน่นบนแขนหุ่นยนต์ จำนวน 3-5 จุด
รูปที่ 3-0: หัวดูดสุญญากาศที่มีเดือย LEGO Plugin ดำ ๆ ด้านล่าง ใช้กดเข้ากับรูบนแขนหุ่นยนต์เพื่อยึด สังเกตรูยึดด้านข้างของตัวปั๊มด้วย - ต่อสายอากาศจากหัวดูดมายังปั๊ม ให้สายโค้งงอได้สะดวก ไม่ตึงและไม่หักงอจนตัน
-
ดู Pinout ที่ฐาน Jetson Nano มีสติกเกอร์สีระบุหมายเลข BCM ของแต่ละพินอยู่ใต้ Header

รูปที่ 3-1: Pinout ของ Header J41 (40-pin GPIO) ที่ฐาน Jetson Nano สังเกตพิน 5V, GND, 20, และ 21 ทางขวาสุด -
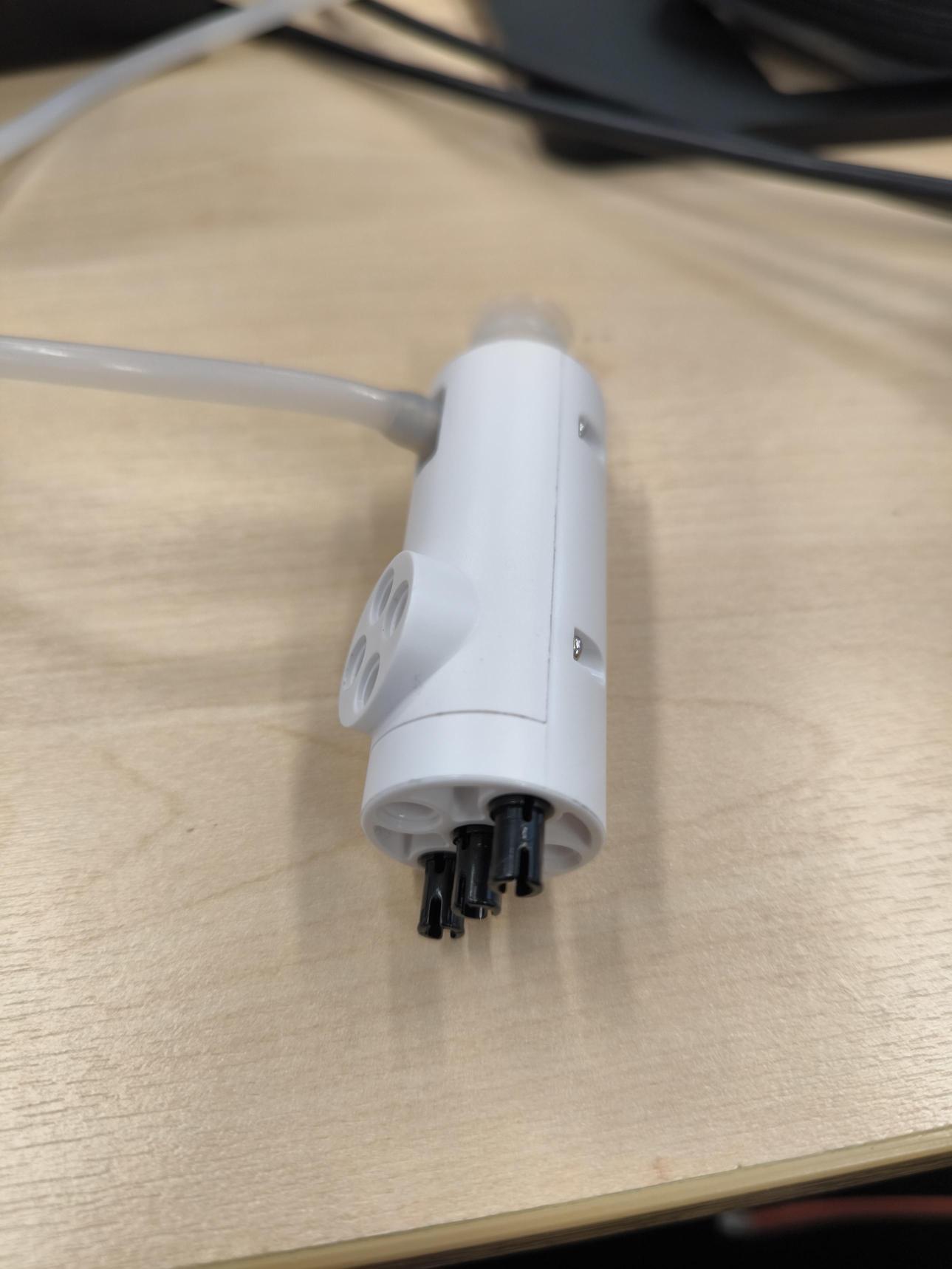
ดูพอร์ตที่ตัวปั๊มสุญญากาศ มีป้าย
GND,5V,G2,G5กำกับชัดเจน
รูปที่ 3-2: พอร์ตด้านข้างของ Vacuum Pump V2.0 มี 4 พิน GND / 5V / G2 / G5สำหรับต่อเข้ากับ Jetson Nano -
ต่อสาย DuPont ตามตารางสีสายด้านล่าง โดยทั่วไปสาย DuPont ที่มาในชุดจะมี 4 เส้น 4 สี
สีสาย พอร์ตที่ปั๊ม พินบน Jetson Nano หน้าที่ ⚫ ดำ GNDGND(พินใดก็ได้ในแถวขวาสุด)กราวด์ 🔴 แดง 5V5V(Pin 2 หรือ Pin 4)ไฟเลี้ยง 🟡 เหลือง G2BCM 21(Pin 40)สัญญาณปล่อยลม (Release) ⚪ ขาว G5BCM 20(Pin 38)สัญญาณดูด (Suction ON) -
ผลลัพธ์เมื่อต่อเสร็จ ตรวจสอบว่าสายเสียบแน่นทุกเส้น และไม่กดทับสายอื่น

รูปที่ 3-3: ตัวอย่างการต่อสายเสร็จสมบูรณ์ สายดำ/แดง/เหลือง/ขาว เสียบเข้ากับ GND, 5V, BCM 21, BCM 20 ตามลำดับ
Pin 38 (BCM 20) ใช้ควบคุมการ เปิด/ปิดสุญญากาศ (ต่อจาก G5)
Pin 40 (BCM 21) ใช้ควบคุมการ ปล่อยลม (Release) เพื่อปล่อยวัตถุ (ต่อจาก G2)
หากต่อสาย 5V กับ GND สลับกัน วงจรของปั๊มจะลัดวงจรทันที อาจทำให้ทั้งปั๊มและ Jetson Nano เสียหายถาวร ตรวจสอบสี/ตำแหน่งทุกครั้งก่อนเปิดเครื่อง
3.4.2 การติดตั้ง Gripper
Gripper เหมาะสำหรับการหยิบวัตถุที่มีรูปทรงไม่สม่ำเสมอ หรือวัตถุที่ปั๊มสุญญากาศไม่สามารถจับได้
ก่อนเริ่มต่อสายควบคุม Gripper เข้ากับหุ่นยนต์ ให้ปิดเครื่อง myCobot และถอด Adapter ออกจากเต้ารับเสียก่อน
- นำ Gripper ประกอบเข้ากับ Flange ที่ปลายแขนหุ่นยนต์
-
ใช้ LEGO Plugin ยึด Gripper ให้แน่นบนแขนหุ่นยนต์ จำนวน 3-5 จุด

รูปที่ 3-4: ด้านท้ายของ Gripper เห็นเดือย LEGO Plugin (สีดำ) 3 จุด พร้อมรูยึดด้านข้าง สำหรับกดเข้ากับแขนหุ่นยนต์ - ต่อสายควบคุม Gripper เข้ากับพอร์ตที่กำหนดบนหุ่นยนต์ myCobot
- ทดสอบการเปิด/ปิด Gripper เบื้องต้นด้วยมือ (ถ้าสามารถทำได้)
สามารถเปลี่ยน End-Effector ได้ตามลักษณะงาน แต่ต้อง Calibrate ใหม่ทุกครั้งหลังเปลี่ยน เพื่อให้ระบบรู้ตำแหน่งปลายเครื่องมือที่ถูกต้อง
3.5 การต่อสายไฟและสายสัญญาณ
การต่อสายเชื่อมระหว่างอุปกรณ์ต่าง ๆ เป็นขั้นตอนสำคัญที่ต้องทำอย่างถูกต้องเพื่อให้ระบบทำงานได้สมบูรณ์
3.5.1 ขั้นตอนการต่อสาย
ก่อนเริ่มต่อสายทุกครั้ง ให้ปิดเครื่อง Jetson Nano และถอด Adapter ทั้งหมดออกจากเต้ารับเสียก่อน
- ต่อสาย USB จากหุ่นยนต์ myCobot 280 JN เข้ากับพอร์ต USB ของ Jetson Nano
- ต่อสาย USB จากกล้อง 3D Vision เข้ากับพอร์ต USB อีกพอร์ตของ Jetson Nano (แนะนำใช้พอร์ต USB 3.0)
- ต่อสายควบคุม GPIO ของปั๊มสุญญากาศเข้ากับ Pin 38 และ 40 บน Jetson Nano
- ต่อ Adapter 12V/5A ตัวเดียว (ที่มาในชุด) เข้ากับช่อง Power Input ของหุ่น — จ่ายไฟทั้งระบบ ทั้งแขนและ Jetson Nano ที่อยู่ในฐาน (ไม่มี Adapter 5V/4A แยกสำหรับ Jetson)
- ปั๊มสุญญากาศรับไฟ 5V + GND จาก Header J41 บนตัวหุ่นโดยตรง — ไม่มี Adapter แยก
- ต่อ Adapter เข้ากับปลั๊กไฟผ่านปลั๊กพ่วงคุณภาพดี
- ต่อสายจอภาพ (HDMI), แป้นพิมพ์ (USB), และเมาส์ (USB) เข้ากับ Jetson Nano
ห้ามต่อสาย USB ของ myCobot และกล้องเข้ากับ USB Hub ที่ไม่มีไฟเลี้ยง (Unpowered Hub) เพราะอาจทำให้กระแสไฟไม่เพียงพอ ระบบทำงานผิดพลาดได้
3.5.2 ตารางสรุปการเชื่อมต่อ
| อุปกรณ์ | พอร์ตที่ใช้ | ปลายทาง | หมายเหตุ |
|---|---|---|---|
| myCobot 280 JN | USB-C | Jetson Nano USB | สายข้อมูล + คำสั่งควบคุม |
| กล้อง 3D Vision | USB 3.0 | Jetson Nano USB 3.0 | ใช้พอร์ต USB 3.0 เพื่อความเร็ว |
| ปั๊มสุญญากาศ (ควบคุม) | GPIO Pin 38, 40 | Jetson Nano GPIO | BCM 20, 21 |
| ปั๊มสุญญากาศ (ไฟ) | 5V + GND | Header J41 | ห้ามต่อผิด ไม่งั้นพัง |
| ไฟเลี้ยงทั้งระบบ (แขน + Jetson) | DC Jack 6.5×2.0 mm | Adapter 12V/5A (ตัวเดียว) | ใช้ Adapter เดิมเท่านั้น — ไม่มี 5V/4A แยกสำหรับ Jetson |
| จอภาพ | HDMI | Jetson HDMI | รองรับ 1080p |
| แป้นพิมพ์ / เมาส์ | USB 2.0 | Jetson USB 2.0 | ทั่วไป |
พอร์ต USB-C ของ myCobot 280 JN สำหรับ debug/programming ภายนอกเท่านั้น
การสื่อสารหลักระหว่าง Jetson Nano (ใน base) กับ controller ของแขนกล
ใช้ UART ภายใน ที่ /dev/ttyTHS1
3.6 รายการตรวจสอบก่อนเปิดเครื่อง
ก่อนเปิดเครื่องครั้งแรก ให้ตรวจสอบรายการต่อไปนี้ทั้งหมดเพื่อความปลอดภัยและประสิทธิภาพการทำงาน:
- ฐานหุ่นยนต์ติดตั้งแน่นหนา ไม่โยกคลอน
- สกรูทุกตัวบนหุ่นยนต์ขันแน่น ไม่หลวม
- End-Effector ติดตั้งถูกต้องและขันแน่น
- กล้อง 3D Vision อยู่ในตำแหน่งและทิศทางที่ถูกต้อง
- สาย USB ทั้งหมดต่อกับ Jetson Nano อย่างถูกต้อง
- สายไฟทุกเส้นต่อเข้ากับ Adapter ที่ถูกต้องตามแรงดันที่กำหนด
- GPIO ของปั๊มสุญญากาศต่อกับ Pin 38, 40 (ถ้าใช้ปั๊ม)
- พื้นที่ทำงานปลอดภัย ไม่มีสิ่งกีดขวางในรัศมีการทำงานของหุ่นยนต์
- จอภาพ แป้นพิมพ์ และเมาส์เชื่อมต่อพร้อมใช้งาน
- ปลั๊กไฟพร้อม แต่ยังไม่เสียบไฟ
เมื่อตรวจสอบครบทุกรายการแล้ว สามารถเสียบปลั๊กไฟและเริ่มเปิดเครื่องได้ (ดู บทที่ 4: การเปิดเครื่องและทดสอบครั้งแรก)